Hi Axel.
I agree, restricting the driver seems to be the best approch. I’ve inserted conservative figures for the two varibles in question and implemented explanatorily error messages for any attempts to lower them further. Mind you I had to hardcode the time for the measurement start time for now as the existing measurement start time field in the GUI expects a value given in percentage and will round any times given in microseconds to one full second.
Also, the new “Very Fast” NPLC setting 0.01 for the pulse capabilities was added and the values added to the entry descriptions to make the process of combining suitable values for measurement start time, pulse duration, peak voltage and NPLC (essentially measurement time requirement) more transparent.
The code contains the scientific notation for the vlaue transfer into the SCPI command as recently implemented in other SMU drivers. If you are going to tackle the problem in the backend soon, it does not need to get transfered.
Best wishes,
Christian
# This Device Class is published under the terms of the MIT License.
# Required Third Party Libraries, which are included in the Device Class
# package for convenience purposes, may have a different license. You can
# find those in the corresponding folders or contact the maintainer.
#
# MIT License
#
# Copyright (c) 2024 SweepMe! GmbH (sweep-me.net)
#
# Permission is hereby granted, free of charge, to any person obtaining a copy
# of this software and associated documentation files (the "Software"), to deal
# in the Software without restriction, including without limitation the rights
# to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
# copies of the Software, and to permit persons to whom the Software is
# furnished to do so, subject to the following conditions:
#
# The above copyright notice and this permission notice shall be included in all
# copies or substantial portions of the Software.
#
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
# FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
# AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
# LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
# OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
# SOFTWARE.
# SweepMe! device class
# Type: SMU
# Device: Agilent 29xx
from __future__ import annotations
from pysweepme.EmptyDeviceClass import EmptyDevice
class Device(EmptyDevice):
def __init__(self):
super().__init__()
self.shortname = "Agilent B29xx"
self.variables = ["Voltage", "Current"]
self.units = ["V", "A"]
self.plottype = [True, True] # True to plot data
self.savetype = [True, True] # True to save data
self.port_manager = True
self.port_types = ["USB", "GPIB"]
self.port_properties = {
# "timeout": 10,
}
self.commands = {
"Voltage [V]": "VOLT", # deprecated, remains for compatibility
"Current [A]": "CURR", # deprecated, remains for compatibility
"Voltage in V": "VOLT",
"Current in A": "CURR",
}
self.pulse_mode = True # enables pulsed signal option in GUI
def set_GUIparameter(self):
GUIparameter = {
"SweepMode": ["Voltage in V", "Current in A"],
"Channel": ["CH1", "CH2"],
"4wire": False,
# "RouteOut": ["Front", "Rear"],
"Speed": ["Very Fast: 0.01NPLC", "Fast: 0.1NPLC", "Medium: 1NPLC", "Slow: 10NPLC"], # NPLCs included to transparently allow for user based measurement time estimations
"Compliance": 100e-6,
"CheckPulse": False,
#"PulseMeasStart_in_s": 750e-6, #for use on the B2902B, defined as the delay for measurement start after pulse release;variable not yet implemented
"PulseOnTime": 1e-3, #for use on the B2902B, defined as the pulse width time
"PulseDelay": 0, #for use on the B2902B, defined as the delay time prior to pulse
"PulseOffLevel": 0.0, #bias voltage during pulse-off
# "Average": 1, # not yet supported
}
return GUIparameter
def get_GUIparameter(self, parameter={}):
self.four_wire = parameter['4wire']
# self.route_out = parameter['RouteOut']
self.source = parameter['SweepMode']
self.protection = parameter['Compliance']
self.speed = parameter['Speed']
# not yet supported
# self.average = int(parameter['Average'])
#
# if self.average < 1:
# self.average = 1
# if self.average > 100:
# self.average = 100
self.device = parameter['Device']
self.channel = str(parameter['Channel'])[-1]
self.pulse = parameter['CheckPulse'] #check in GUI is pulse option has been selected
#self.pulse_meas_time_in_s = parameter['PulseMeasStart_in_s'] #for use on the B2902B, defined as the delay for measurement start after pulse release; variable not yet implemented
self.ton = float(round(float(parameter["PulseOnTime"]), 6)) #for use on the B2902B, defined as the pulse width time
self.toff = float(parameter["PulseDelay"]) #for use on the B2902B, defined as the delay time prior to pulse
self.pulseofflevel = parameter['PulseOffLevel'] #bias voltage during pulse-off
def initialize(self):
# once at the beginning of the measurement
#if float(self.pulse_meas_time_in_s) < 750e-6: #variable not yet implemented
# raise Exception("High voltage pulses can take as much as 750us to ramp up, measurement might start too early.\nPlease increase pulse measurement (start-)time or modify driver source code after validating your usecase with an Oscillopscope.")
if float(self.ton) < 1e-3:
raise Exception("Measurement at 0.01 NPLC requires at least 200us@50Hz PLC, pulse measurement start time is set to 750us minimum.\nThrefore, shortest pulse width is restricted to 1ms to ensure proper measurement at long ramp-up times of high current and voltage values.")
self.port.write("*RST")
self.port.write("SYST:BEEP:STAT OFF") # control-Beep off
self.port.write(":SYST:LFR 50") # LineFrequency = 50 Hz
def configure(self):
if self.source.startswith("Voltage"):
self.port.write(":SOUR%s:FUNC:MODE VOLT" % self.channel)
# sourcemode = Voltage
self.port.write(":SOUR%s:VOLT:MODE FIX" % self.channel)
# sourcemode fix
self.port.write(":SENS%s:FUNC \"CURR\"" % self.channel)
# measurement mode
self.port.write(":SENS%s:CURR:PROT %s" % (self.channel, self.protection))
# Protection with Imax
self.port.write(":SENS%s:CURR:RANG:AUTO ON" % self.channel)
# Autorange for current measurement
elif self.source.startswith("Current"):
self.port.write(":SOUR%s:FUNC:MODE CURR" % self.channel)
# sourcemode = Voltage
self.port.write(":SOUR%s:CURR:MODE FIX" % self.channel)
# sourcemode fix
self.port.write(":SENS%s:FUNC \"VOLT\"" % self.channel)
# measurement mode
self.port.write(":SENS%s:VOLT:PROT %s" % (self.channel, self.protection))
# Protection with Imax
self.port.write(":SENS%s:VOLT:RANG:AUTO ON" % self.channel)
# Autorange for voltage measurement
if self.speed.startswith("Very Fast"): #newly impplemented to allow for measurements during fast pulses
self.nplc = "0.01"
elif self.speed.startswith("Fast"):
self.nplc = "0.1"
elif self.speed.startswith("Medium"):
self.nplc = "1.0"
elif self.speed.startswith("Slow"):
self.nplc = "10.0"
self.port.write(":SENS%s:CURR:NPLC %s" % (self.channel, self.nplc))
self.port.write(":SENS%s:VOLT:NPLC %s" % (self.channel, self.nplc))
self.port.write(":SENS%s:CURR:RANG:AUTO:MODE RES" % self.channel)
# 4-wire sense
if self.four_wire:
self.port.write("SENS:REM ON")
else:
self.port.write("SENS:REM OFF")
# Averaging is not yet supported but the below code might help to implement
"""
# averaging
self.port.write(":SENS:AVER:TCON REP") # repeatedly take average
if self.average > 1:
self.port.write(":SENS:AVER ON")
self.port.write(":SENSe:AVER:COUN %i" % self.average) # repeatedly take average
else:
self.port.write(":SENS:AVER OFF")
self.port.write(":SENSe:AVER:COUN 1")
"""
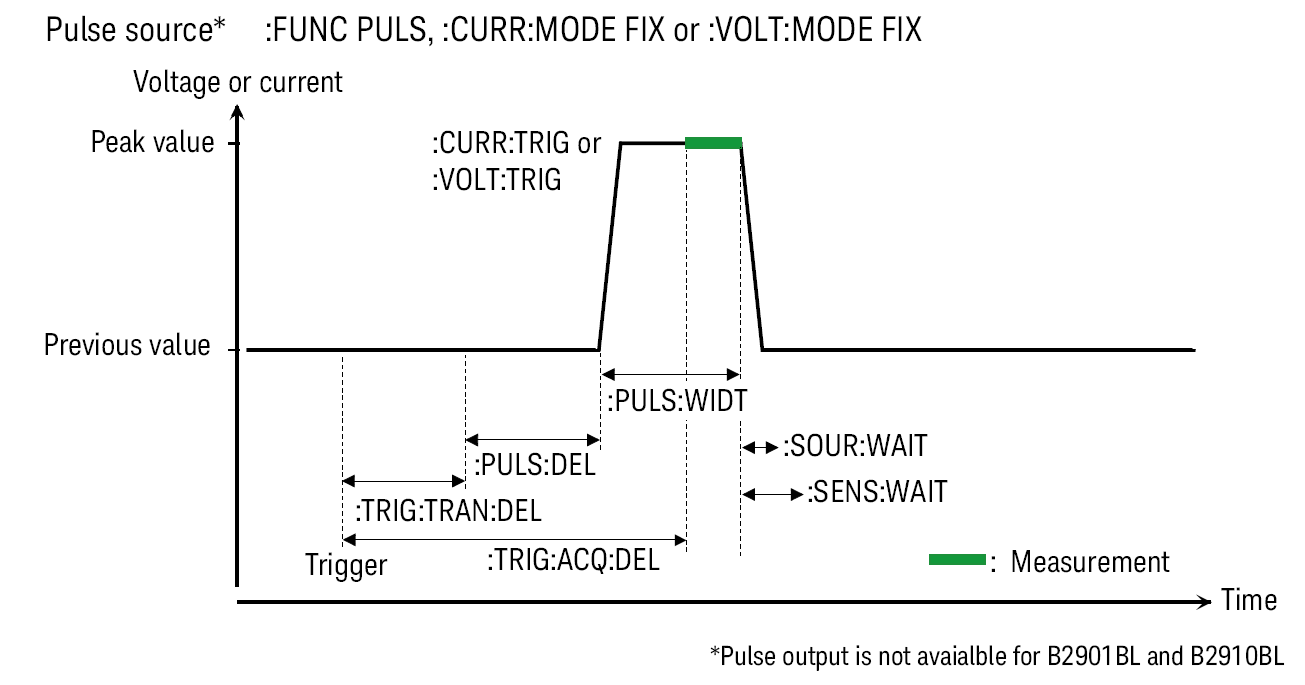
if self.pulse:
self.port.write(":FUNC PULS") #switch to pulse output instead of "DC"
self.port.write(":PULS:WIDT %s" % self.ton) #pulse width time
self.port.write(":PULS:DEL %s" % self.toff) #delay prior to pulse
self.port.write(":SOUR%s:FUNC:TRIG:CONT OFF" % self.channel) #switch off continuous operation of internal trigger
self.port.write(":SOUR%s:WAIT ON" % self.channel) #enables to wait for any change of amplitude past pulse
self.port.write(":SENS%s:WAIT ON" % self.channel) #enables wait time for start of measurement defined by delay
self.port.write(":TRIG%s:TRAN:DEL MIN" % self.channel) #trigger delay hardcoded to 0s
self.port.write(":TRIG%s:ACQ:DEL 750e-6" % self.channel) #delay of measurement after pulse release is triggered; takes care of ramp-up
self.port.write(":TRIG%s:ALL:COUN 1" % self.channel) #sets trigger count, 1 for single pulse
self.port.write(":TRIG%s:LXI:LAN:DIS:ALL" % self.channel) #disable LXI triggering
self.port.write(":TRIG%s:ALL:SOUR AINT" % self.channel) #enable internal trigger
self.port.write(":TRIG%s:ALL:TIM MIN" % self.channel) #set trigger daly to minimum; not to be mixed up with pulse delay
self.port.write(":FORM:ELEM:SENS VOLT,CURR,TIME,STAT,SOUR") #defining the measurement out sizes
self.port.write(":SYST:TIME:TIM:COUN:RES:AUTO ON") #activates a counter timer reset
else:
self.port.write(":FUNC DC") #use traditional DC output instead of pulse
def deinitialize(self):
if self.four_wire:
self.port.write("SYST:REM OFF")
self.port.write(":SENS%s:CURR:NPLC 1" % self.channel)
self.port.write(":SENS%s:VOLT:NPLC 1" % self.channel)
# self.port.write(":SENS:AVER OFF")
# self.port.write(":SENSe:AVER:COUN 1")
def poweron(self):
self.port.write(":OUTP%s ON" % self.channel)
def poweroff(self):
self.port.write(":OUTP%s OFF" % self.channel)
def apply(self):
value = str("{:.4E}".format(self.value)) #makes sure that self.value fits into SCPI command in terms of length
if self.pulse:
self.port.write(":SOUR%s:%s %s" % (self.channel, self.commands[self.source], self.pulseofflevel)) #get channel ready at specified values
self.port.write(":SOUR%s:%s:TRIG %s" % (self.channel, self.commands[self.source], value)) #arming the pulse trigger
self.port.write(":INIT (@%s)" % self.channel) #releasing the pulse trigger
else:
self.port.write(":SOUR%s:%s %s" % (self.channel, self.commands[self.source], value)) # set output to specified values
def call(self):
if self.pulse:
self.port.write(":FETC:ARR? (@%s)" % self.channel) # get measured values taken during pulse release out of the memory
else:
self.port.write(":MEAS? (@%s)" % self.channel) #taking a measurement during constant DC output
answer = self.port.read()
values = answer.split(",")
voltage = float(values[0])
current = float(values[1])
return [voltage, current]
# here functions wrapping communication commands start
def enable_output_protection(self, state: str | bool) -> None:
"""Enables over voltage / over current protection.
If the SMU hits the compliance the output will be switched off. This features is a safety feature to prevent
further voltage or current being applied to the device under test.
The output protection does not change whether the compliance is active.
The default after a reset (*RST) of the device is OFF.
"""
if state is True or state == "ON":
state = "ON"
elif state is False or state == "OFF":
state = "OFF"
else:
msg = "State '%s' unknown and cannot be handled." % str(state)
raise Exception(msg)
self.port.write(f":OUTP{self.channel}:PROT {state}")